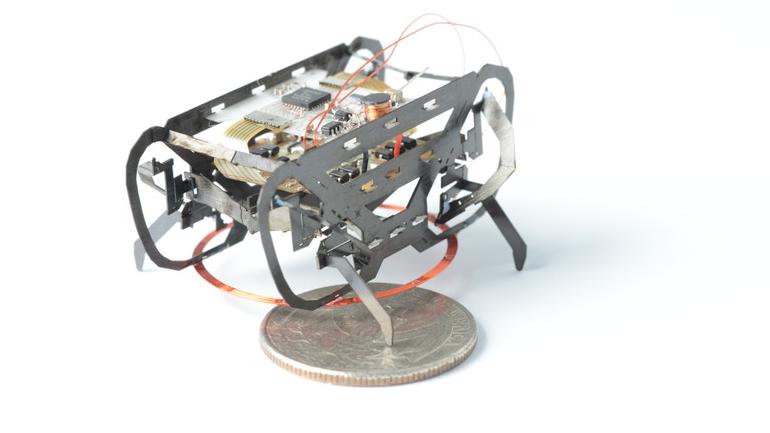
HAMR-E是HARM的先进模型,是一种可以爬上垂直表面的专门设计的机器人科学家们已经建造了一种名为HAMR-E的新型机器人,它的粘性脚垫,折纸踝关节和专门设计的行走步态使机器人能够在垂直和上下导电表面上攀爬。名为HAMR-E的新机器人基于现有的微型机器人之一HAMR。
根据发表在“科学机器人”杂志上的研究,HAMR的四条腿使它能够在平坦的表面上行走并在水中游泳。
HAMR-E类似于HAMR机器人,但是科学家必须解决一系列挑战才能使HAMR-E成功地粘附并穿过它在喷气发动机中遇到的垂直,倒置和弯曲表面。
根据美国哈佛大学Wyss生物启发工程研究所前研究员Sebastien de Rivaz的说法,新机器人可以三维探测,而不是仅仅在平面上来回移动。
Rivaz还认为,有一天他们还可以对大型机器难以触及的区域进行无创检查。
制作
研究人员需要制造粘性足垫,即使在倒置时也能保持机器人附着在表面上,同时还要释放以允许机器人通过抬起和放置脚来“行走”。
焊盘由聚酰亚胺绝缘的铜电极组成,其能够在焊盘和下面的导电表面之间产生静电力。
通过打开和关闭电场可以很容易地释放和重新接合脚垫,该电场以类似于移动机器人腿所需的电压操作,因此需要非常小的额外功率。
电动脚垫可以产生5.56克的剪切力和6.20克的法向力 - 足以使1.48克重的机器人不会滑落或从其攀爬表面掉落。
除了提供高粘合力之外,垫还设计成能够弯曲,从而允许机器人在弯曲或不平坦的表面上攀爬。
科学家还为HAMR-E创造了新的踝关节,它可以三维旋转,以补偿腿部行走时的旋转,使其能够保持其在攀爬表面上的方向。
关节由分层玻璃纤维和聚酰亚胺制成,折叠成折纸状结构,允许所有腿的脚踝自由旋转,并在HAMR-E爬升时被动地与地形对齐。
最后,研究人员为HAMR-E创建了一种特殊的行走模式,因为它需要有三英尺的垫子始终接触垂直或倒置的表面,以防止它掉落或滑落。
猜你喜欢
最新文章










- 房山区疫情最新数据消息情况-(北京时间)截至4月9日13时30分房山区今天疫情数据统计通报
- 门头沟区疫情最新数据消息情况-(北京时间)截至4月9日13时30分门头沟区今天疫情数据统计通报
- 海淀区疫情最新数据消息情况-(北京时间)截至4月9日13时30分海淀区今天疫情数据统计通报
- 朝阳区疫情最新数据消息情况-(北京时间)截至4月9日13时30分朝阳区今天疫情数据统计通报
- 中卫疫情最新数据消息情况-(北京时间)截至4月9日13时30分中卫今天疫情数据统计通报
- 固原疫情最新数据消息情况-(北京时间)截至4月9日13时30分固原今天疫情数据统计通报
- 银川疫情最新数据消息情况-(北京时间)截至4月9日13时30分银川今天疫情数据统计通报
- 喀什疫情最新数据消息情况-(北京时间)截至4月9日13时30分喀什今天疫情数据统计通报
- 阿克苏地区疫情最新数据消息情况-(北京时间)截至4月9日13时30分阿克苏地区今天疫情数据统计通报
- 巴州疫情最新数据消息情况-(北京时间)截至4月9日13时30分巴州今天疫情数据统计通报
- 人们在GMCHummerEV选项上花费巨资

2022-04-10 10:23:41
- 谷歌加入三星与iFixit合作开展自我修复计划

2022-04-10 10:23:38
- 用新的TinyTanTamagotchi将BTS放在口袋里

2022-04-10 10:23:37
- 红米Note10Pro它的能源消耗也令人印象深刻

2022-04-09 09:34:43
- 铃木HustlerRoughRoadStyle是对时髦跨界车的一种粗犷设计

2022-04-09 08:46:21